3D scanning like a pro
Almost any sensor yields more interesting results if mounted on a moving platform. Remember scanning thermometer? It’s time to mount TOF LIDAR (Time Of Flight / Light Imaging, Detection, And Ranging) on two precision rotary stages arranged for pan and tilt operation. Rig provides real-time position data along with distance to an obstacle. Using simple math we can calculate position in Cartesian coordinate system. Data is collected point by point to reconstruct 3D object model.
Used parts
I have been looking for LIDAR for a while and decided to use Garmin as an affordable distance sensor, so bought one for a spin.
- Modular motorized rotary stage Kurokesu RSA1
- Motion controller Kurokesu SCA1
- Arduino nano (Atmega 328p) with Garmin LIDAR-Lite 3
- Laptop computer
- Battery pack for controller
Results
Garmin LIDAR outputs data at up to 500 measurements a second which is way faster than thermal sensor, yet it takes about 15 minutes to scan full sphere yielding true scale 1-2M point cloud. No stitching, no lengthy post processing! And result is spectacular.
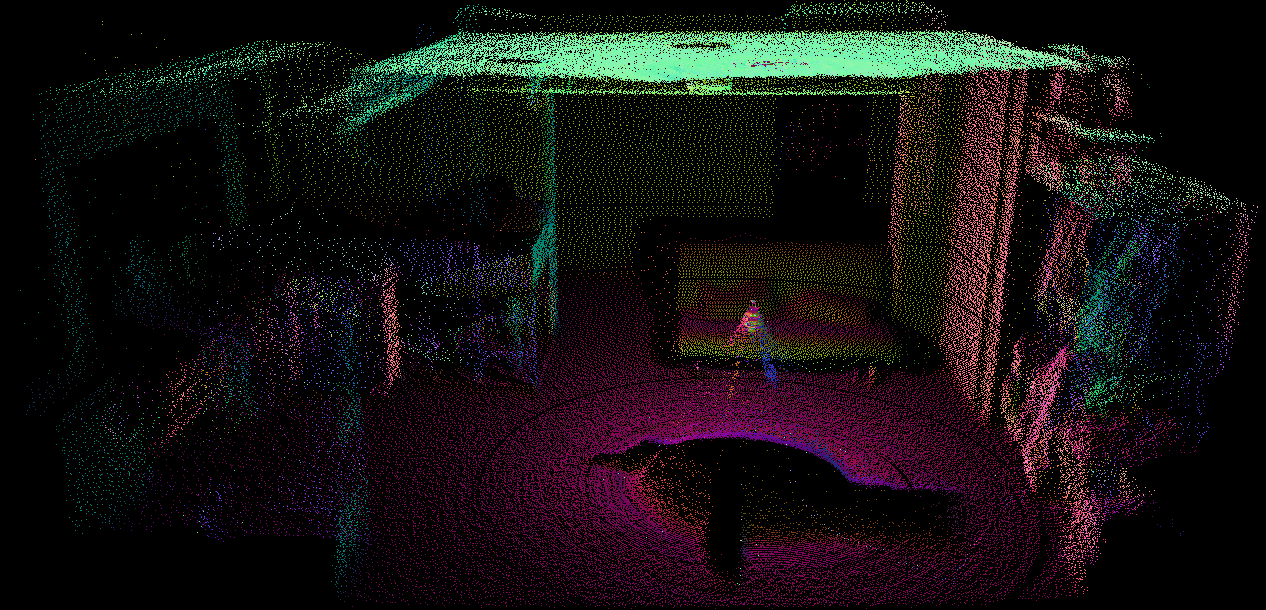
Animated GIF for better depth perception. Calculated point cloud normals and colorized according to their vector direction. Click for better quality in Youtube.
 This is another fast scan with higher rotation speed. Result is 300K point cloud.
This is another fast scan with higher rotation speed. Result is 300K point cloud.
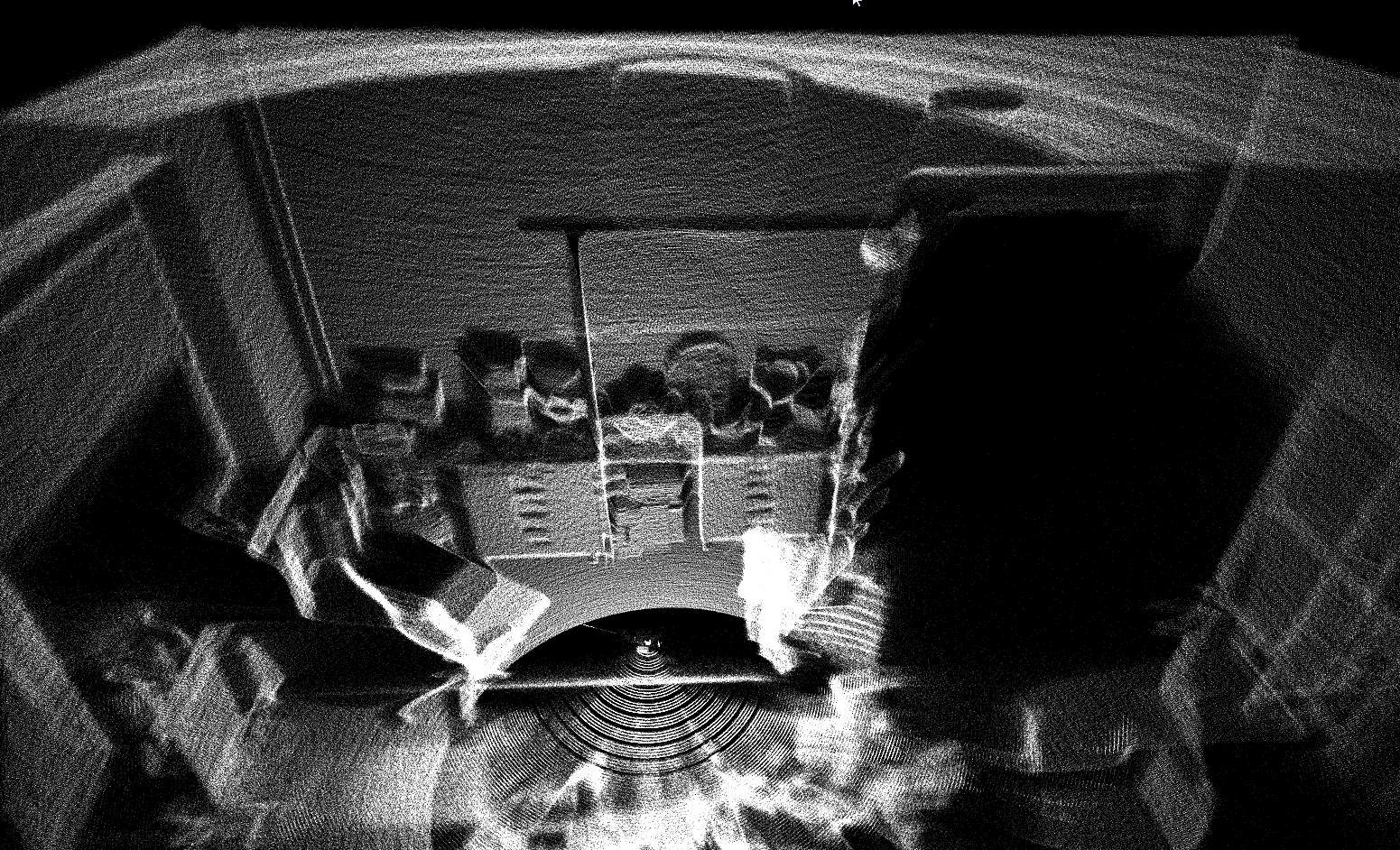
 4.7M point cloud room view from above with colors removed. From this picture it’s possible to see that distance measurement could be more precise and laser beam angle could be narrower. Density is pretty even which indicates nice rotary stage performance and correct calculation.
4.7M point cloud room view from above with colors removed. From this picture it’s possible to see that distance measurement could be more precise and laser beam angle could be narrower. Density is pretty even which indicates nice rotary stage performance and correct calculation.
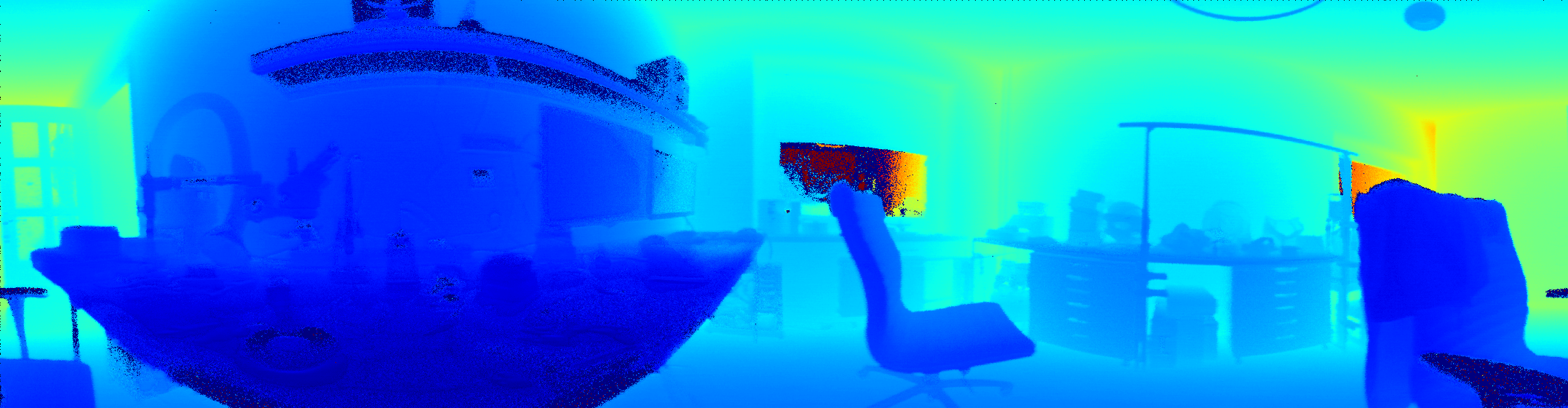
 Depth map colorized in heatmap colors and fixed black pixels. This imaging is useful for fast quality inspection.
Depth map colorized in heatmap colors and fixed black pixels. This imaging is useful for fast quality inspection.
 Unfortunately this particular LIDAR is not quite suitable for outdoor mapping. Laser is too weak even in dusk and measurement rate drops, therefore scanning speed has to be reduced and it would take hours to cover longer range. Click for better quality in Youtube.
Unfortunately this particular LIDAR is not quite suitable for outdoor mapping. Laser is too weak even in dusk and measurement rate drops, therefore scanning speed has to be reduced and it would take hours to cover longer range. Click for better quality in Youtube.
 Laser barely reaches 4’th floor, therefore making it not suitable for long range outdoor operation.
Laser barely reaches 4’th floor, therefore making it not suitable for long range outdoor operation.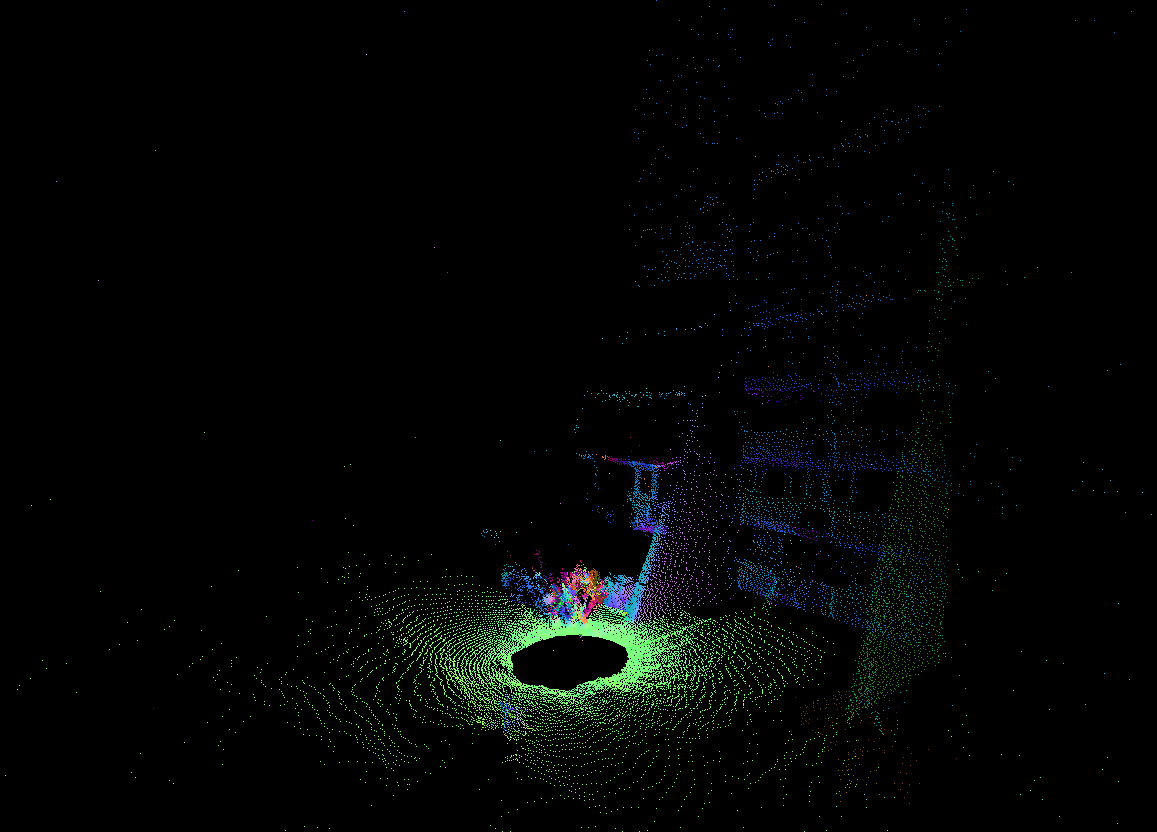
Software
I have written set of Python scripts to make scans like this. As release is still pending, will briefly describe what they do:
Scan
- Establish communication to sensor and motion controller
- Initialize motion platform (homing, zeroing)
- Start motion at specified speed and tilt incline angle. Rotation count is calculated automatically. Platform rotates at constant angular speed gradually changing tilt angle
- Platform position data is being recorded into file along with timestamp
- Sensor data is being recorded into separate file along with timestamp
- After scan is complete platform moves home and computer beeps to indicate end of scan
Fill dead pixels
- Load bitmap picture (generated as intermediate result by aggregate script)
- Find black pixels
- For each black pixel find neighbouring pixels, average their color and fill black pixel with new value
- Save file as new bitmap picture
Finding of black pixels can be done by brute force but it will take ages. Speed up can be done by using numpy functionality:
pixels = np.asarray(img_gray) coordList = np.where(pixels != 0) coordinates = zip(coordList[0], coordList[1])
Aggregate
- Load previously saved files (position data and sensor values)
- For each sensor value interpolate motor position from two nearest points (aligned by timestamp)
- Convert depth data to color and coordinates into 2D picture for fast preview (or final picture in case of thermometer)
- Convert angle and measured depth to Cartesian coordinate system and save each pixel to *.xyz file.
Pan/tilt/distance conversion to x,y,z is as simple as these formulas:
x = r * sin(th) * cos(tv) y = r * sin(th) * sin(tv) z = r * cos(th)
That’s it. Now point cloud file can be opened with preferred 3D manipulation program like MeshLab
Improvements and notes
Main part to be improved is LIDAR. Faster acquisition rate, smaller beam expansion, better precision and greater power is required.
Motion platform operation is quiet, smooth, fast and precise.Though with faster laser fast axis might be limiting factor.
Draft software lacks real-time preview of what’s happening, but that’s easy to update.
One slip-ring is damaged (or bad by design) and sometimes I2C communication is interrupted – added watchdog protection to restore LIDAR operation.
One more major update could be getting rid of laptop, instead using single board computer with tablet or smartphone connected over WiFi.
Comments ( 32 )