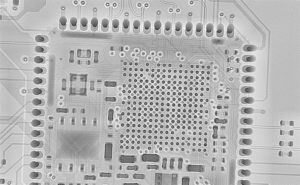
I have a suspicion that my soldering skills are not good enough, and I don’t want to overheat the board by replacing SOC a third time. It means one thing – today is X-ray day! No shorts, soldering could be better, but overall looks ok. Ethernet still does not work. But now, when I know […]
Read MoreEthernet camera module build log #1 – Assembly day
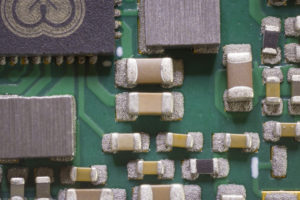
After receiving fresh boards, it’s time to bring the Allwinner S3 CPU-based camera module to life. End even have some output on the console. It’s promising! USB and Ethernet does not work, though. Re-soldered S3 chip, and now USB is working. Ethernet is still dead.
Read MoreExperiments with parfocal motorized zoom lens

Motorized zoom camera C1_PRO_X18 has two independent stepper motors for Zoom and Focus control. More specifications can be found in the documentation area. By design, this varifocal lens means the focus will be lost after the magnification motor is moved. However, the lens has linear rail reference points and it is possible to calibrate the lens so it will behave like […]
Read MoreAccurately measure height with microscope

As the subject implies this post describes a way to measure the height of an object using the motorized microscope. The whole trick is to take many incremental pictures of an object (and background as a reference) from different heights and analyze how sharp each frame is. Some interesting hardware is needed, but nothing that […]
Read MoreSecond life for x18 motorized lens

Had this 18x (5.4-96mm focal distance) salvaged zoom lens in my “inbox” for a while. Finally made it “tick” again with C1 camera and motorized lens controller. Replacing imager was a matter of unscrewing old one and screwing on C1 PCB – mounting hole spacing matched. And talking of controller – it was not even […]
Read MoreRobotic vacuum cleaners compared like never before
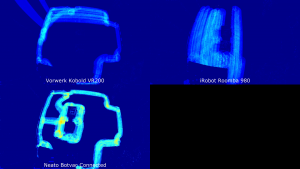
It’s been a while since my experiments to analyze robotic vacuum cleaner motion. That time I used Kurokesu C1 camera mounted near the ceiling, recorded motion and ran some simple computer vision algorithms to get live heat map. Result is well described in previous blog record heatmap video of one robot. This time I present […]
Read More3D scanning like a pro
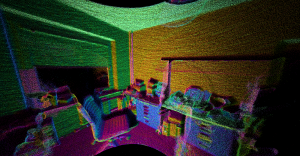
Almost any sensor yields more interesting results if mounted on a moving platform. Remember scanning thermometer? It’s time to mount TOF LIDAR (Time Of Flight / Light Imaging, Detection, And Ranging) on two precision rotary stages arranged for pan and tilt operation. Rig provides real-time position data along with distance to an obstacle. Using simple […]
Read MoreDIY thermal vision shoots 360 panoramas
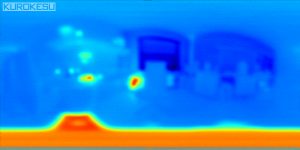
Like most of you, I do like new technology and spend some money on new parts, sensors, toys, instruments and gadgets. While purchased small toy is on slow route I usually forget about it and remember only after it is delivered. Then item is settled in box proudly named “inbox” and continues it’s existence there […]
Read MoreIt takes two Raspberries to run a clock
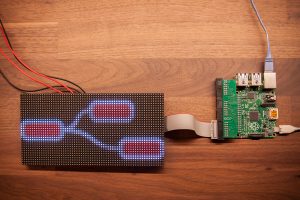
Despite lousy title, I will tell my success story how to add visual output to well known IoT tool called Node-RED. One Raspberry Pi, let’s call it RPI-RED, will be running Node-RED another one RPI-LED will be dedicated to server LED panel. First you should should install Node-RED to RPI-RED. Installation is well described in […]
Read MoreNode-RED for rapid hardware wiring
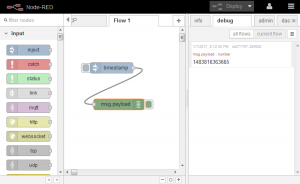
I will be posting few interesting follow-up posts that are based on tool for wiring together hardware devices called Node-RED. This post will serve as a reference how to prepare Raspberry Pi and install dependencies. Besides usual IoT stuff (sensor serving, data collection, aggregation and decision making) I see great opportunity to use node-red in rapid […]
Read More