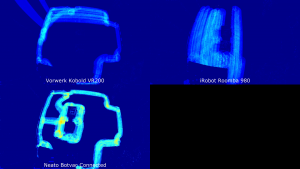
It’s been a while since my experiments to analyze robotic vacuum cleaner motion. That time I used Kurokesu C1 camera mounted near the ceiling, recorded motion and ran some simple computer vision algorithms to get live heat map. Result is well described in previous blog record heatmap video of one robot. This time I present […]
Read More