
Motorized zoom camera C1_PRO_X18 has two independent stepper motors for Zoom and Focus control. More specifications can be found in the documentation area. By design, this varifocal lens means the focus will be lost after the magnification motor is moved. However, the lens has linear rail reference points and it is possible to calibrate the lens so it will behave like […]
Read MorePulling full resolution from a webcam with OpenCV (Windows)

OpenCV while being the most popular tool for a lot of machine vision applications it relies on a third party and some poorly maintained code. Capturing MJPEG compressed video from a UVC USB camera was always the case and it did not work or worked with some issues. This situation is especially bad for Windows OS. […]
Read MoreUVC camera exposure timing in OpenCV
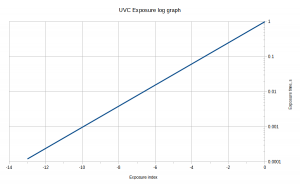
USB cameras can have the exposure set to manual (cheaper ones have only full auto mode). It’s a pretty straight forward function in OpenCV, but insufficiently documented thus hard to find exact times and calculations. Also there are two major implementations for Linux and Windows. Linux – exposure times are set in units 1/s (all […]
Read MoreWhich USB to COM port is the most recent one?

How many times did you find yourself looking for Windows Control Panel and wondering which is the most recent plugged USB to SERIAL com port? Well simple and clean Python script comes very handy for this task. Just start a script and plug in new device – new com port will be displayed with minimal […]
Read MoreRobotic vacuum cleaners compared like never before
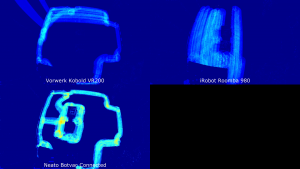
It’s been a while since my experiments to analyze robotic vacuum cleaner motion. That time I used Kurokesu C1 camera mounted near the ceiling, recorded motion and ran some simple computer vision algorithms to get live heat map. Result is well described in previous blog record heatmap video of one robot. This time I present […]
Read More3D scanning like a pro
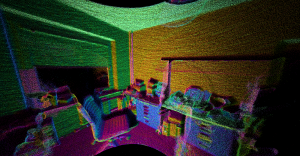
Almost any sensor yields more interesting results if mounted on a moving platform. Remember scanning thermometer? It’s time to mount TOF LIDAR (Time Of Flight / Light Imaging, Detection, And Ranging) on two precision rotary stages arranged for pan and tilt operation. Rig provides real-time position data along with distance to an obstacle. Using simple […]
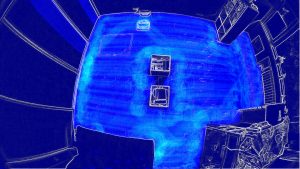
Read MoreDIY thermal vision shoots 360 panoramas
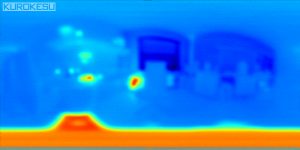
Like most of you, I do like new technology and spend some money on new parts, sensors, toys, instruments and gadgets. While purchased small toy is on slow route I usually forget about it and remember only after it is delivered. Then item is settled in box proudly named “inbox” and continues it’s existence there […]
Read MoreDumb thermometer gets digital output

Some time ago I purchased 4 channel thermometer. Soon after tried few optical character recognition (OCR) techniques on 7 segment symbols including pytesseract, they worked but I was not happy with results. Few days ago pyimagesearch published article detailing his approach. So I pushed it a bit forward and made solution more robust. Also added […]
Read MoreIt takes two Raspberries to run a clock
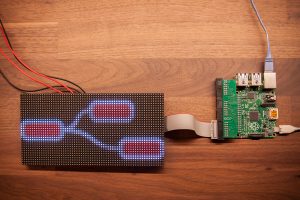
Despite lousy title, I will tell my success story how to add visual output to well known IoT tool called Node-RED. One Raspberry Pi, let’s call it RPI-RED, will be running Node-RED another one RPI-LED will be dedicated to server LED panel. First you should should install Node-RED to RPI-RED. Installation is well described in […]
Read MoreHeatmap motion analysis of autonomous robot
I have always wanted to ease my daily life and obtain vacuum robot. Many things were stopping for a while, but finally found a local company which provides demo units so could not resist taking one for a spin. What a good chance to run some computer vision processing algorithms to analyze it! Seen few […]
Read More